

Q: Can the output switch noise of the ultra-low noise μ Module regulator be further reduced?
Answer: Using a second-order output filter can reduce the output noise of the ultra-low noise module regulator by more than 90%. Caution must be exercised when selecting capacitors and inductors to ensure that the control circuit can operate quickly and stably. This design is particularly beneficial for wireless and RF applications, as fast transient response can effectively shorten system blanking time and improve signal processing efficiency. The noise level of this method is comparable to LDO, and its efficiency is comparable to that of a switching regulator.
The power consumption of noise sensitive devices continues to increase. Applications such as medical ultrasound imaging systems, 5G transceivers, and automated testing equipment (ATE) require high output current (>5 A), low noise levels, and high bandwidth to be achieved on small PCBs. Due to the high demand for output current, the traditional two-stage (step-down+low dropout (LDO) regulator) solution previously used required a large PCB area, resulting in high power consumption and therefore not very popular.
LTM4702 ultra-low noise? Does the Module voltage regulator use ADI's proprietary Silent Switcher? Technology that combines ultra fast transient response and ultra-low noise characteristics. Thanks to this, the efficiency of the device can be comparable to synchronous switching regulators, making it an ideal choice for high current and noise sensitive applications. In many applications, this solution can eliminate LDO circuits, saving approximately 60% of LDO costs, at least 4 W of LDO power consumption, and 2 cm ² or more of LDO PCB space (including gaps).

As is well known, for certain applications that require very small switching frequency ripple, second-order LC filters can reduce the switching frequency harmonics of the output voltage. However, relying solely on this method to minimize switch ripple while maintaining control loop stability and high bandwidth is not feasible. An unoptimized LC filter can make the control loop unstable, leading to output oscillation. This article first analyzes the simplified loop of second-order LC filters, and then proposes an intuitive design method for guiding capacitor allocation and inductance calculation. The proposed design method is validated through the LTM4702 design example.
Loop analysis of second-order LC output filter design In current mode buck regulators, the output impedance is the controlled object. Figure 1 shows the circuit of second-order LC and its typical Bode plot. In order to accurately regulate the DC voltage even under load, it is necessary to detect the remote node B of VOUT.
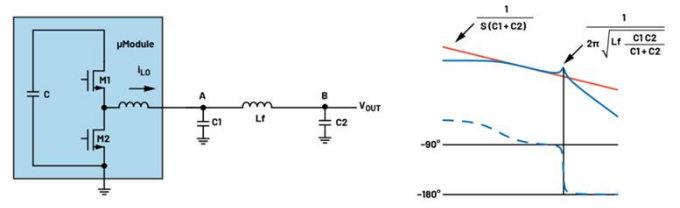
Figure 1. Current mode voltage regulator and second-order LC with typical Bode plot
The conversion function from VOUT to iLO is:
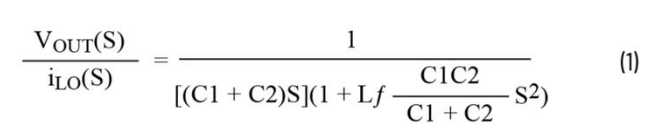
From the conversion function (Formula 1), it can be seen that a second-order LC filter will introduce a frequency equal to the resonant frequency
The bipolar point of the rate. From the typical Bode plot in Figure 1, it can be seen that there is a steep 90 ° phase delay at the resonant frequency. To ensure stability, the resonant frequency should be 4 to 5 times higher than the bandwidth of the control loop, in order to avoid potential unstable 90 ° phase delays. In addition, to attenuate the switching frequency ripple to a sufficiently low level, the resonant frequency should be set to 1/5 to 1/4 of the switching frequency, so that the LC filter can provide sufficient filtering effect. There is a trade-off between the attenuation gain at switching frequency and the bandwidth of the control loop. But this method helps to select the resonant frequency and determine the appropriate LC value.
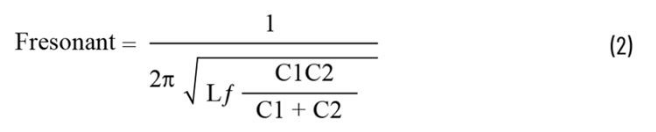
In order to maintain similar load transient performance, the output impedance before and after adding LC filters should be consistent. In other words, regardless of whether there is an LC filter or not, the output capacitance should be roughly the same. Based on past experience, the capacitance value of C2 in Figure 1 can be similar to that without LC, while C1 can use much smaller capacitance so that C1 can dominate the resonant frequency position. Since C1 is much smaller than C2, formula 2 can be simplified to formula 3:
It is recommended that C1 be at least one tenth of the value of C2. After selecting C1, the Lf value can be calculated using the resonant frequency in formula 3. By checking the availability of actual components, appropriate C1 and Lf values can be determined.
The selection of capacitors and inductors is crucial in the design of effective second-order LC filters. The second-order LC filter needs to provide sufficient attenuation at the switching frequency. The switching frequency of the ultra-low noise module regulator is relatively high, about 1 MHz to 3 MHz, so the inductance and capacitance in the second-order LC need to have good high-frequency characteristics. The selection requirements for C2 are similar to designs without LC, so they will not be discussed here. The selection criteria for C1 and Lf are as follows.
The selection criteria for C1 capacitors. The self resonant frequency of C1 must be higher than the switching frequency. The impedance of C1 at switching frequency is the key to second-order LC design. It is recommended to use ceramic capacitors, whose self resonant frequency can be determined by referring to the impedance frequency relationship curve. Usually, typical 0603 or 0805 size ceramic capacitors are ideal choices, and their self resonant frequency must be above 3 MHz. In order to withstand the required current, the RMS current rating should be sufficiently high. Assuming that all AC ripples pass through C1, ceramic capacitors should be able to handle larger RMS ripple currents. The current capacity of ceramic capacitors can be determined by referring to the relationship curve between temperature rise and current. Based on experience, about 4 A rms is a good choice for capacitors of size 0603.
For output currents below 8A, it is recommended to use ferrite beads as the selection criteria for Lf inductors, as they have good high-frequency characteristics and compact size. Ferrite magnetic beads also help suppress extremely high frequency spikes. For output currents above 8 A or requiring larger inductors, it may be difficult to find suitable ferrite beads, so it is recommended to use traditional shielding inductors. Choose ferrite beads/inductors with a sufficiently large RMS current rating, for example, for output currents below 8 A, choose inductors with an RMS current rating of 8 A. What is the recommended inductance value for the selected device? 10% of the inductance value of the module device.
Ultra low noise? Module Design Example Figure 2 shows a design example of LTM4702. This scheme combines ultra-low electromagnetic interference (EMI) radiation and ultra-low effective noise characteristics, and the switching frequency can be adjusted within the range of 300 kHz to 3 MHz. In the design example, the switching frequency is set to 2 MHz to optimize the noise performance for applications ranging from 12 VIN to 1 VOUT. According to the proposed LC filter design method, the resonant frequency of the second-order LC is set to 400 kHz to 500 kHz, which is 1/5 to 1/4 of the switching frequency.
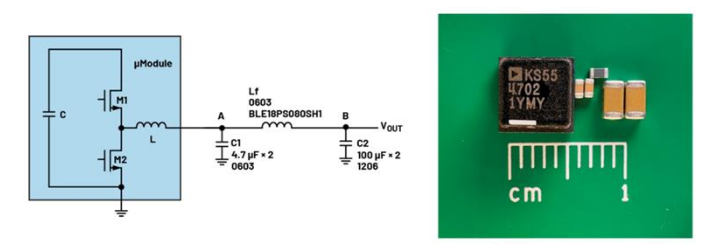
Figure 2. Sample circuit and circuit board photo of LTM4702
The target control loop bandwidth is 100 kHz, and the LC resonant frequency is 4 to 5 times higher than it; C1 uses two 0603 4.7 F capacitors; Ferrite magnetic bead BLE18PS080SH1 is used as Lf, with a size of 0603, as shown in Figure 2; C2 still uses two 1206 100F ceramic capacitors; The resonant frequency is 424 kHz.

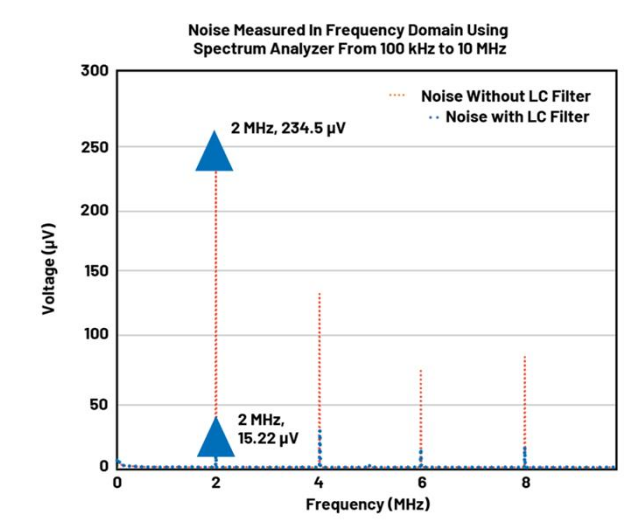
The comparison of noise measurements is shown in Figure 3. At a switching frequency of 2 MHz, the output switch ripple without LC is 234 V, which is significantly reduced to 15 V after adding 0603 ferrite beads.
The second-order LC filter added to minimize noise can maintain the control loop bandwidth at 100 kHz and maintain fast transient response with a recovery time of less than 10 seconds. These results can be confirmed by comparing experimental evaluations with and without LC filters. Due to the recovery time being 10? Within s, the blanking time can be ignored, which is a very good performance for wireless and RF applications. ADI's LTM4702 helps system designers and developers solve the challenge of load transient blanking time, avoiding the problem of low signal processing efficiency.
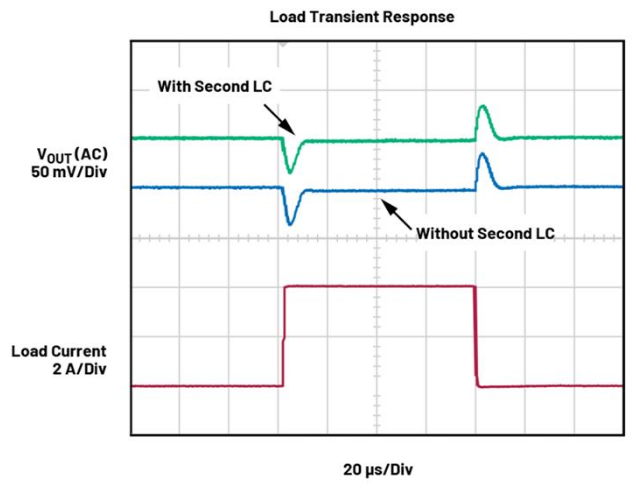
Figure 4. Transient results of load: without LC and with LC (recovery time at 10?)? Within s
Compared to design examples without this filter, it is no less impressive.
How to minimize noise while ensuring high efficiency and stability while supporting high current applications is a challenging problem. Adding a second-order LC filter can significantly reduce noise, but if not optimized properly, it may lead to circuit instability. In order to minimize noise as much as possible without affecting stability, an optimized second-order LC filter should be used. Carefully selecting the required inductance and capacitance components based on switching frequency, control loop bandwidth, and resonant frequency can effectively reduce switching noise while maintaining fast transient response and high bandwidth characteristics.
